Double Pendulum Example¶
A double pendulum is a dynamic system which has chaotic mostion for many initial conditions.
The derivation of the derivative function for this example is taken from https://myphysicslab.com/pendulum/double-pendulum-en.html

When the system is defined as a series of first-order differential equations the state vector is
\[ \begin{align}\begin{aligned}\begin{split} X = \begin{bmatrix}
\theta_1 \\ \theta_2 \\ \omega_1 \\ \omega_2
\end{bmatrix}\end{split}\\and the derivative of the system is\end{aligned}\end{align} \]
\[\begin{split}\dot{X} = \begin{bmatrix}
\dot{\theta_1} \\ \dot{\theta_2} \\ \dot{\omega_1} \\ \dot{\omega_2}
\end{bmatrix} = \begin{bmatrix}
\omega_1 \\ \omega_2 \\
\frac{-g (2 m_1 + m_2) \sin{\theta_1} - m_2 g \sin(\theta_1 - 2 \theta_2) - 2 \sin(\theta_1 - \theta_2) m_2 (\omega_2^2 L_2 + \omega_1^2 L_1 \cos(\theta_1 - \theta_2))}{L_1 (2 m_1 + m_2 - m_2 \cos(2 \theta_1 - 2 \theta_2))} \\
\frac{2 \sin(\theta_1 - \theta_2)(\omega_1^2 L_1 (m_1 + m_2) + g (m_1 + m_2) \cos{\theta_1} + \omega_2^2 L_2 m_2 \cos(\theta_1 - \theta_2))}{L_2 (2 m_1 + m_2 - m_2 \cos(2 \theta_1 - 2 \theta_2))}
\end{bmatrix}.\end{split}\]
[1]:
cd ..
/home/docs/checkouts/readthedocs.org/user_builds/ode-solver/checkouts/master
[2]:
import numpy as np
import ode
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
from IPython.display import HTML
def doublependulum(t,X):
th1, th2, om1, om2 = X
g = 9.81
m1 = 1
m2 = 1
l1 = 1
l2 = 1
k1 = -g * ((2 * m1) + m2) * np.sin(th1)
k2 = m2 * g * np.sin(th1 - (2 * th2))
k3 = 2 * np.sin(th1 - th2) * m2
k4 = ((om2**2) * l2) + ((om1**2) * l1 * np.cos(th1 - th2))
k5 = m2 * np.cos((2 * th1) - (2 * th2))
k6 = 2 * np.sin(th1 - th2)
k7 = ((om1**2) * l1 * (m1 + m2))
k8 = g * (m1 + m2) * np.cos(th1)
k9 = (om2**2) * l2 * m2 * np.cos(th1 - th2)
dX = np.array([
om1,
om2,
(k1 - k2 - (k3 * k4)) / (l1 * ((2 * m1) + m2 - k5)),
(k6 * (k7 + k8 + k9)) / (l2 * ((2 * m1) + m2 - k5))
])
return dX
[3]:
def angles2xy(th1, th2, om1, om2):
l1 = 1
l2 = 1
x1 = l1 * np.sin(th1)
y1 = -l1 * np.cos(th1)
x2 = x1 + (l2 * np.sin(th2))
y2 = y1 - (l2 * np.cos(th2))
return x1, y1, x2, y2
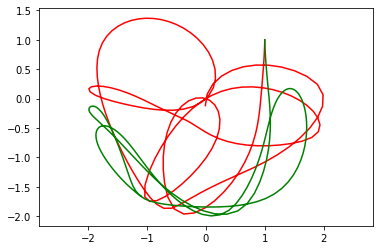
et, ex = ode.euler(doublependulum, [np.pi/2,np.pi,0,0], [0,5], .025)
th1, th2, om1, om2 = ex
ex1, ey1, ex2, ey2 = zip(*[angles2xy(*xi) for xi in zip(th1, th2, om1, om2)])
bet, bex = ode.backwardeuler(doublependulum, [np.pi/2,np.pi,0,0], [0,5], .025)
bex1, bey1, bex2, bey2 = zip(*[angles2xy(*xi) for xi in zip(*bex)])
fig, ax = plt.subplots()
ax.plot(ex2, ey2, 'r', bex2, bey2, 'g')
ax.set_aspect('equal', 'datalim')
plt.show()
[4]:
#plt.rcParams['figure.dpi'] = 120
fig, ax = plt.subplots()
ax.axis([-2, 2, -2, 2])
ax.set_aspect('equal')
trace_euler, = plt.plot([], [], 'r', animated=True)
pend_euler, = plt.plot([], [], 'ro-', animated=True)
trace_backeuler, = plt.plot([], [], 'g', animated=True)
pend_backeuler, = plt.plot([], [], 'go-', animated=True)
anim_ex2 = []
anim_ey2 = []
anim_bex2 = []
anim_bey2 = []
def update(frame):
anim_ex2.append(ex2[frame])
anim_ey2.append(ey2[frame])
pend_euler_x = [0, ex1[frame], ex2[frame]]
pend_euler_y = [0, ey1[frame], ey2[frame]]
anim_bex2.append(bex2[frame])
anim_bey2.append(bey2[frame])
pend_backeuler_x = [0, bex1[frame], bex2[frame]]
pend_backeuler_y = [0, bey1[frame], bey2[frame]]
trace_euler.set_data(anim_ex2, anim_ey2)
pend_euler.set_data(pend_euler_x, pend_euler_y)
trace_backeuler.set_data(anim_bex2, anim_bey2)
pend_backeuler.set_data(pend_backeuler_x, pend_backeuler_y)
return trace_euler, pend_euler, trace_backeuler, pend_backeuler
%matplotlib inline
ani = FuncAnimation(fig, update, frames=range(len(et)), blit=True)
HTML_ani = HTML(ani.to_jshtml())
#HTML_ani = HTML(ani.to_html5_video())
#ani.save('DoublePendulumExample.gif', writer='imagemagick', fps=60)
HTML_ani
[4]: